经典算法题:找出二维平面中距离最近的两个点
题目介绍
给定一个二维平面,上面有若干个点,算出距离最近的两个点的距离,可以有重合(相同)的点,这样的话两个点的距离为 0。
首先,我们先不着急着解题,先把需要定义的定义清楚,这样才有解题方向。
因为是二维平面,所以对于任意一个点 $ p_1 $,可以表示成 $ p_1 = (x_1,y_1) $,这样的话我们就可以借助 欧几里得距离 公式来计算两点间的距离。比如 $ p_1 = (x_1,y_1) $ 与 $ p_2 = (x_2,y_2) $ 之间的距离就是 $ \sqrt{(x_1-x_2)^2 + (y_1-y_2)^2} $。
暴力解法
通常一开始,我们可以先试着求解,而暂时不去思考优化的事情。一般来说,最直接的方法就是枚举所有可能的情况。对于这道题来说,我们已经知道了所有点,以及它们对应的坐标,我们可以找出所有两两配对的情况 $ (p_i,p_j) $ 其中 $ i != j $,然后求出所有可能的配对的欧几里得距离,选出最小的配对即可。伪代码如下
1
2
3
4
5
min = MAX_VALUE;
for( i = 0; i < allPoints.length; i++ )
for( j = i + 1; j < allPoints.length; j++ )
if (min > dist(pi,pj))
min = dist(pi,pj)
假设平面上有 N 个点,那么就会有 $ N(N-1)/2 $ 个配对情况,时间复杂度为 $ O(N^2) $。
暴力解法是可行的,但有没有时间复杂度更低的算法呢?
分治
上面的暴力解法的时间复杂度为 $ O(N^2) $,而想要确定距离最短的配对,遍历所有的点是必须的,所以理性地推测,这个时间复杂度不可能低于 $ O(N) $,而配对不仅仅是简单的遍历就完事了,所以优化后的复杂度大概率是 $ O(NlogN) $。
那这个复杂度又让你想到什么呢?很自然地可以想到排序,但是这里的难点是,我们只能对一个维度的东西进行排序,而这里的点是有两个维度的,排序一个维度后这道题依然没有很清晰的思路。
这里我们可以试着用实现排序的方式来思考,前面我们介绍了 归并排序 以及 快速排序,这两个排序算法的核心都是分治,区别无非是如何分,如何治。那分治的思想用在这里是否合适呢?
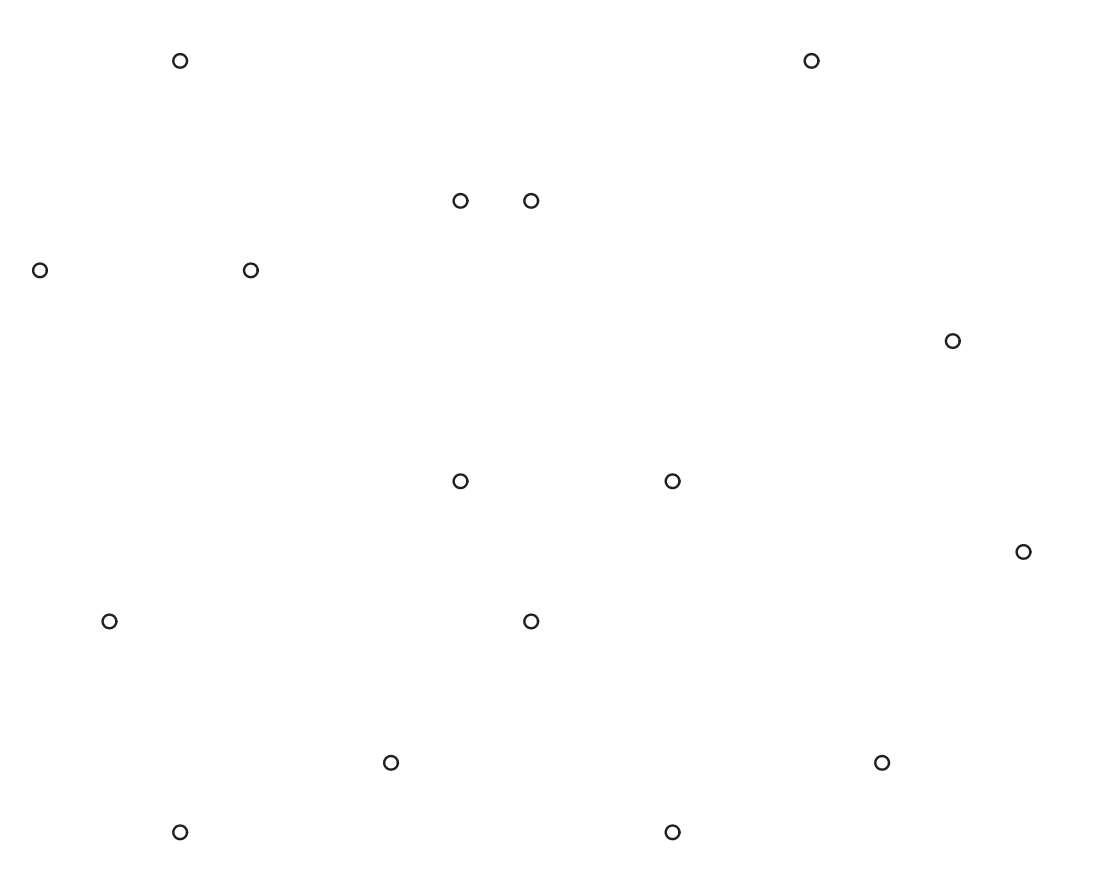
分治的第一步就是 “分”,首先从整体看,二维平面可以平行于 Y 轴一刀下去分成两个平面,然后这两个平面又可以再继续分成四个平面,四个平面再继续分成八个,以此类推。直到不能再分(一个平面中仅仅剩下两个点)即可。排序算法也是干了这个事,这里只不过把数组换成了平面,道理是一样的。
剩下的就是 “治” 与最后的 “合”,因为分到最后一个平面仅剩下两个点,所以答案直接可以计算出来,但是问题是一个平面中的点还可以与旁边平面的点配对,并且这个配对也有可能是最小。所以,在合的时候,我们还需要跨平面考虑。如下图所示
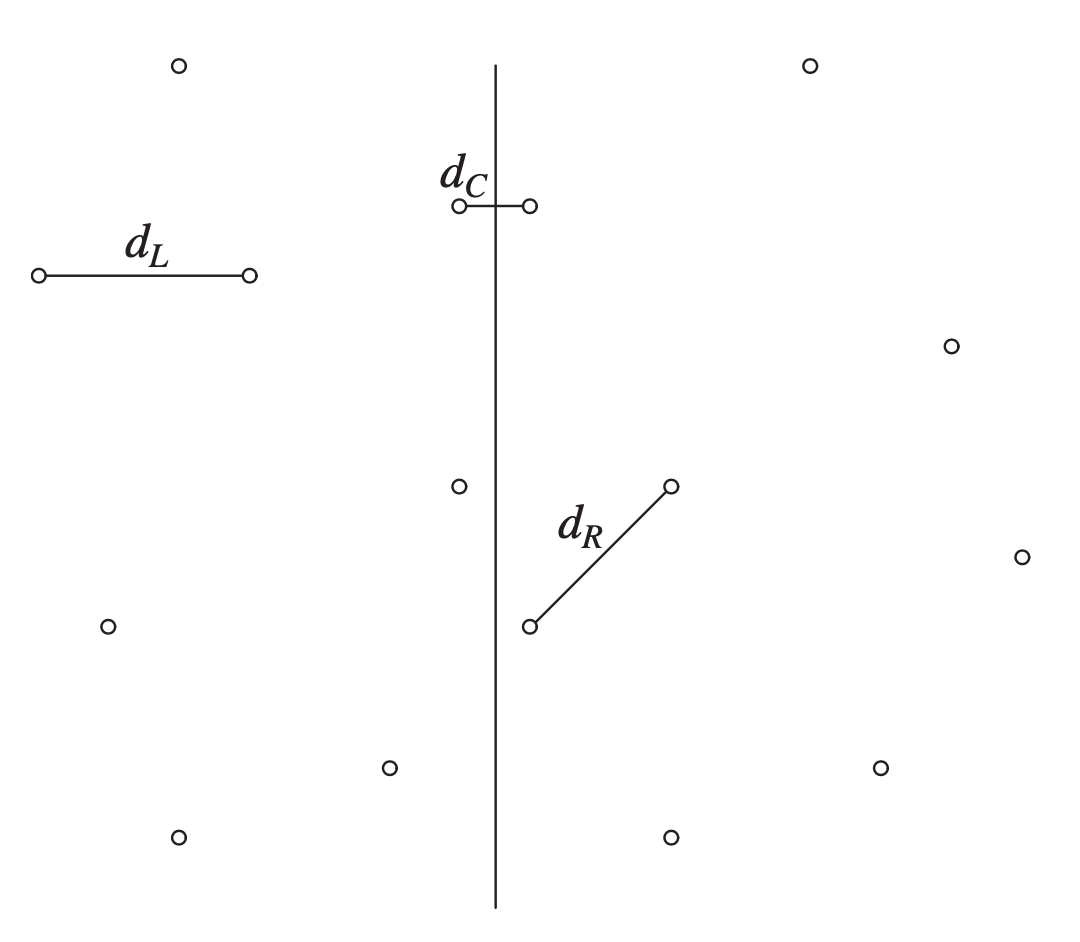
当我们对两个平面进行合并的时候,有 3 个情况要考虑:
- 两个平面合并后,距离最短的两个点($ d_L $)都在左平面
- 两个平面合并后,距离最短的两个点($ d_R $)都在右平面
- 两个平面合并后,距离最短的两个点($ d_C $),一个在左平面,一个在右平面
对于 1 和 2,其实在合并之前我们就已经知道了,现在的问题是如何解决第三种情况?
一开始我们提到,我们希望能将时间复杂度优化至 $ O(NlogN) $,而从之前的排序算法也可以看到,合的这一步的时间复杂度是 $ O(N) $,那么计算 $ d_C $ 肯定就不能用之前的暴力解法,我们需要好好利用已得的条件,也就是这里的 $ d_L $ 与 $ d_R $。
很明显,知道了 $ d_L $ 与 $ d_R $,求解 $ d_C $ 时,我们就可以缩小配对的范围。因为这里我们求的是最小,因而我们只需要考虑比 $ min(d_L,d_R) $ 小的情况,假设 $ δ = min(d_L,d_R) $,我们就可以把 $ d_C $ 的求解范围缩小到 $ 2δ $ 这个小区间内,如下图所示:
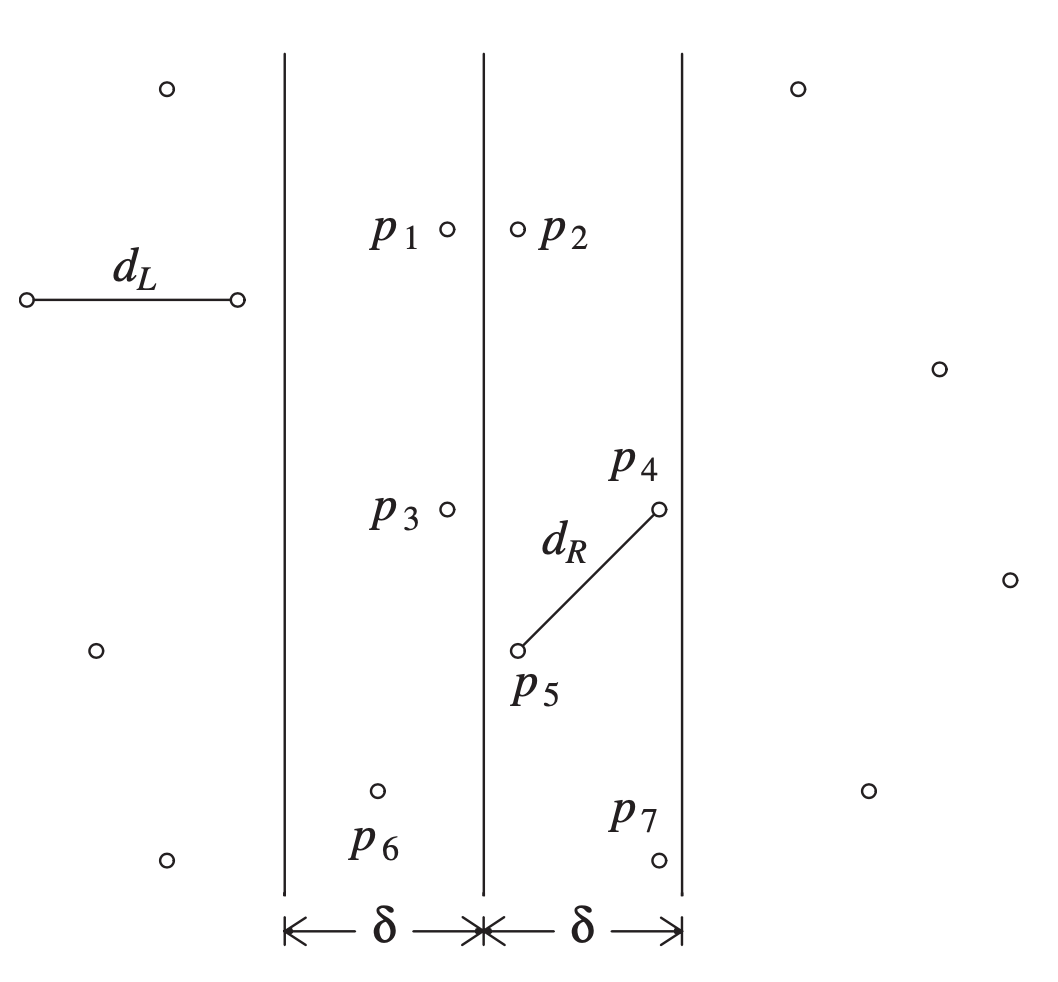
如果这个时候在这个小区间内进行暴力求解,枚举所有情况的话,速度会比之前快不少。可问题是,从(最差)时间复杂度来考虑,这个优化依然不到位,因为总是会有特殊情况,导致大部分的点都被框进小区间,最差时间复杂度依旧是 $ O(N^2) $。所以我们还是得继续优化。
有一个点是,前面将区间缩小到 $ 2δ $ 这个狭长的小区域,我们仅仅考虑了 X 轴,并没有考虑 Y 轴,那么我们能否对 Y 轴做同样的事情呢?答案是肯定的,因为 $ δ $ 限定的是(欧几里得)距离,所以当我们在对任意一点进行配对时,如果对面平面的点在 Y 轴上与之差距过大,我们可以直接排除,无需计算,所以我们可以继续去缩小这个查找范围:
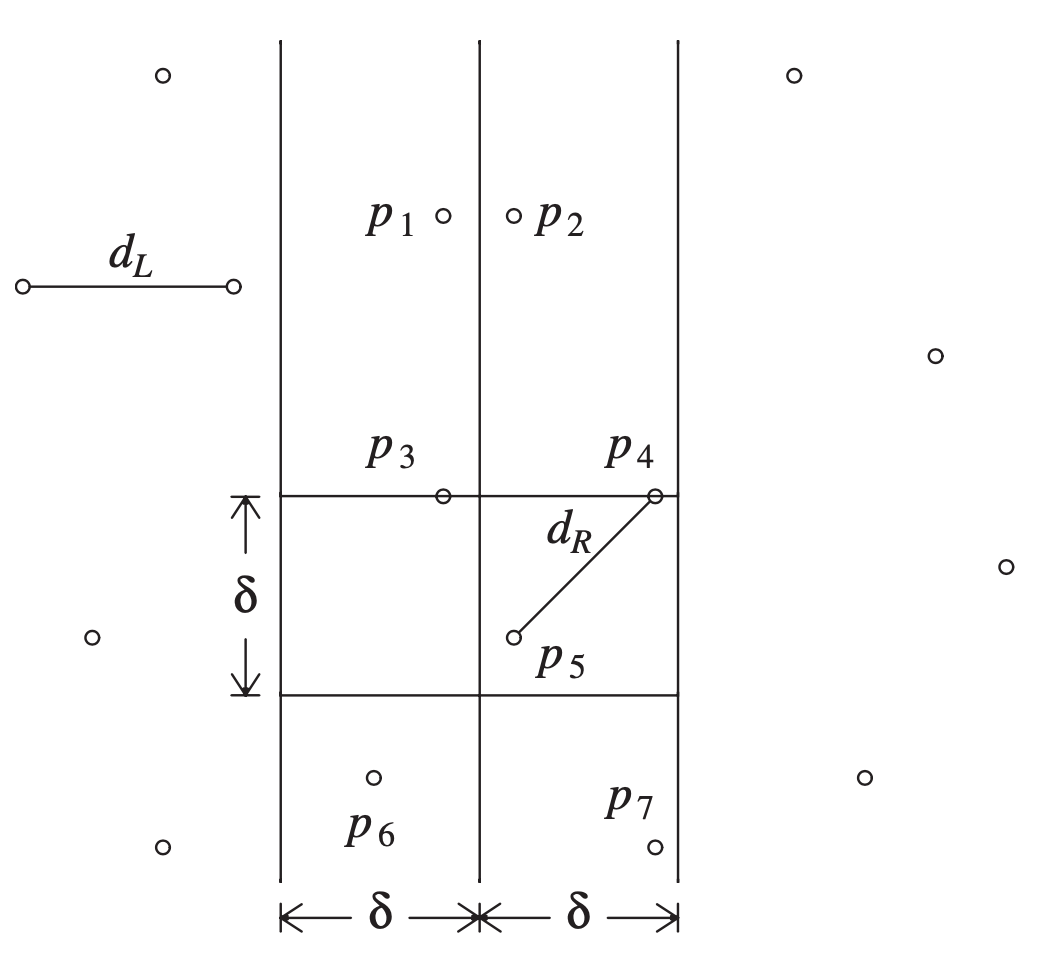
由上图可见,在找一个点的配对点时,我们将配对范围缩小到了一个长为 $ 2δ $,宽为 $ δ $ 的长方体,那优化到这里是否足够了呢?答案也是肯定的。这里我们可以试着分析一下最坏情况,也就是这个区间内最多可能有多少个点。
我们把这个长方形一分为二,分成左右两个边长为 $ δ $ 的正方形,左边的正方形属于左平面,右边的正方形属于右平面。仅单独考虑每个正方形的话,因为这是在一个平面内的,所以其中的点的配对距离必然是等于或者大于 $ δ $ 的,也就是说一个正方形中最多存在四个点,这四个点分散在四角,两个正方形的话就是八个点,如下图所示(可以把这里的 $ λ $ 看成是 $ δ $):
也就是说在 $ 2δ $ 这个狭长区域的任意一点 $ p_i $ 进行配对时,最差的情况都仅需要考虑有限个可能的点,因而这部分的计算时间是 $ O(1) $,所以计算 $ d_C $ 的时间也就是 $ O(N) $。
把 “合” 这部分的逻辑用伪代码写出来就是如下的形式:
1
2
3
4
5
6
for( i = 0; i < numPointsInStrip; i++ )
for( j = i + 1; j < numPointsInStrip; j++ )
if( pi and pj’s y-coordinates differ by more than δ )
break;
else if( dist(pi, pj) < δ )
δ = dist(pi, pj);
另外,整个算法在实现上,还有一些具体的细节。因为输入的点是无序排列的,而我们需要将这些点均匀地一分为二,所以在进行分治前,需要将数据先基于 X 坐标排序一遍。排序算法的复杂度为 $ O(NlogN) $,所以这个预处理也不会增加整个算法的时间复杂度。
但是仅有这个预处理还不够,在合的时候我们还对点的 Y 坐标进行了考量和筛选,所以我们还得做另一个预处理,就是把所有的点基于 Y 坐标排一遍,这样我们就有两个序列,一个是基于 X 排完的结果,另一个是基于 Y 排完的结果。在每次分的时候,分割线由基于 X 排序的序列确定,并将 X 序列等量一分为二,在此之后,我们可以用 $ O(N) $ 的时间遍历一遍基于 Y 排列好的序列,然后对照着分割线的 X,生成左右两个排序好的 Y 序列。这些操作均不会影响最终的时间复杂度。同理,在合的过程中,当 $ 2δ $ 的狭长区域确定后,我们依旧可以通过 $ O(N) $ 时间遍历 Y 序列并仅选出在区域内的点,选出来的这些点依旧是排好序的。
加上上述细节,整个算法的时间复杂度就被优化成了 $ O(NlogN) $。