图上的最短路径:Dijkstra
图的基本概念
在开始今天的内容之前,我们先来弄清楚两个问题,“图是什么?”,“图又有哪些表示形式?”。
同链表和树一样,图也是由两个东西组成————节点(vertices)和边(edges)。与图不同的是,链表和树都会对其边做一些限制,比如对普通单链表来说,每个节点一一首尾相连,一眼看过去,链表就是一个线性结构。树的话在链表的基础上放宽要求,比如二叉树的每个节点可以有两个子节点,但是一般说来,和单链表一样,树的边也是有方向性的(父 ——> 子)。
链表和树都是对节点以及边做了些限制而得到,我们可以说链表是图,也可以说树是图,图是链表和树之上更宽的一个概念。一个图可以表示成 G = (V, E),其中 V 表示节点,E 表示边。
这就完了吗?图的概念很广,链表是图,树是图,节点和边随随便便放在一起也是图,如果仅仅提到图,我们很难清楚这东西具体指什么,因此我们会对其细分。
要知道,不管是图、链表或是树,他们的节点都是一样的,不一样是对边的要求。根据对边的要求的不同,我们可以得到下面这些概念:
- 根据边是否具有方向性,我们可以将图分为 有向图(directed graph)和 无向图(undirected graph)
- 根据是否有环,我们可以将图分为有环图 和 无环图(acyclic graph),一般来说话默认可能有环
- 根据边是否带有权重,可以分为 有权图(weighted graph) 和 无权图(un weighted graph)。一般默认无权
上面着三个基本概念可以自由组合,比如被广泛提及的有向无环图——DAG(Directed Acyclic Graph)。
当然,图中还有一个 路径(path) 的概念,把它单独拆出来看就类似是一个链表。简单路径(simple path) 指的是除首尾节点外,路径上访问到的节点不能重复。
还有一个连通的概念,如果从图上任何一个节点出发,总是能访问其他所有节点,那么这个图就是 连通的(connected)。在有向图中,为了对这个概念细分,连通的图被称为 强连通(strongly connected)。如果一个有向图不是连通的,但是将其看成是无向图却是连通的话,那么这个有向图就是 弱连通(weakly connected)。完全图(complete graph) 的要求更加严格,表示任何一对节点之间都存在直接相连的边,当然这也是边最多的情况,拿无向图来说,这里 $ E = V(V-1)/2 $。
图上的最短路径问题
给定一个有向图 G = (V, E),以及一个节点 s,我们需要找到 s 与其他任意节点之间的最短的路径(路径的长度是路径上所有边的权重之和)。
这个问题看似清晰明了,实则禁不起推敲,如果允许图有环并且允许边的权重为负的话,那么存在的一种情况是,一条路径无限次经过权重为负的边,这样最短路径可以到负无穷。我们必须做一些限制,要不就是图中没有权重为负的情况,要不就是当存在这种情况是最短路径为 0。
图上的最短路径算法
最短路径算法多种多样,今天我们要介绍的 Dijkstra 算法是其中最广为人知的一种,它背后的思想是 贪心。贪心的本质思想就是 局部最优可以扩展到全局最优,但要知道这个思想并不是任何时候都奏效,反证法是证明贪心无效的常见途径,也就是说你找到一种情况,局部最优没法推广到全局最优,那么就说明贪心无效,但是反过来,证明贪心有效往往不是那么容易,有时需要复杂的数学推导和证明。
当我们用 Dijkstra 来求最短路径是,还需要有一个前提————图中不能存在权重为负的边,否则的话,该算法求解出来的结果就会是错误的,至于原因我们后面会解释。
Dijkstra 算法的思想是,从起始节点开始,每到一个节点,标记已经访问,已经标记的节点将不再被访问,我们时刻记录到每个节点所需要的花费,如果此时没有遍历到某节点则表明花费为 ∞,我们每次都选择当下花费最小的节点作为下一个要标记的节点。
说的有点抽象,还是来举个例子:
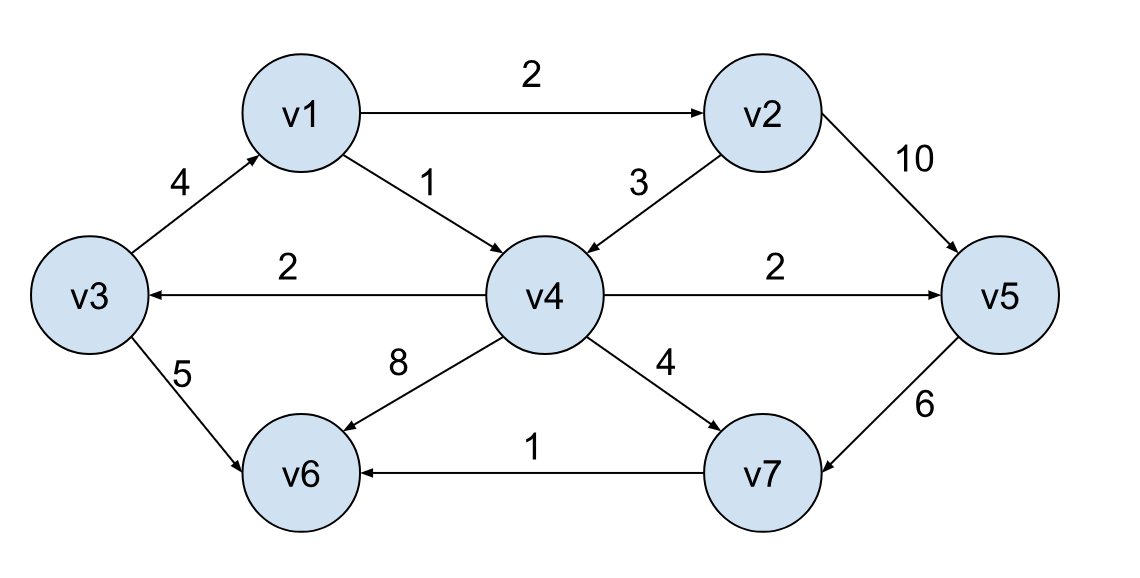
假设我们的起始节点为 v1,也就是说我们到 v1 的花费为 0:
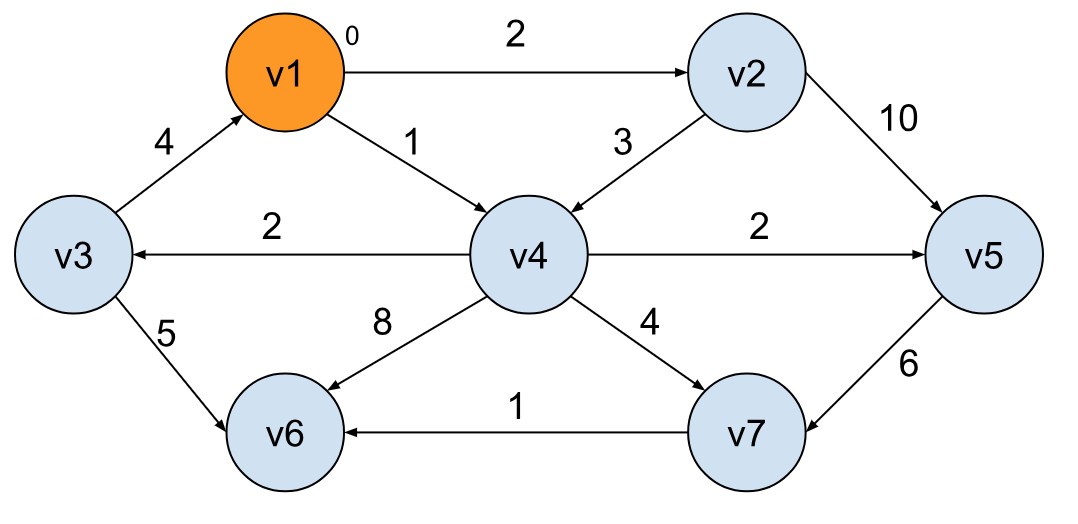
从 v1 为起点,我们可以到达 v4 和 v2,这里我们选择最小情况,也就是 v4:
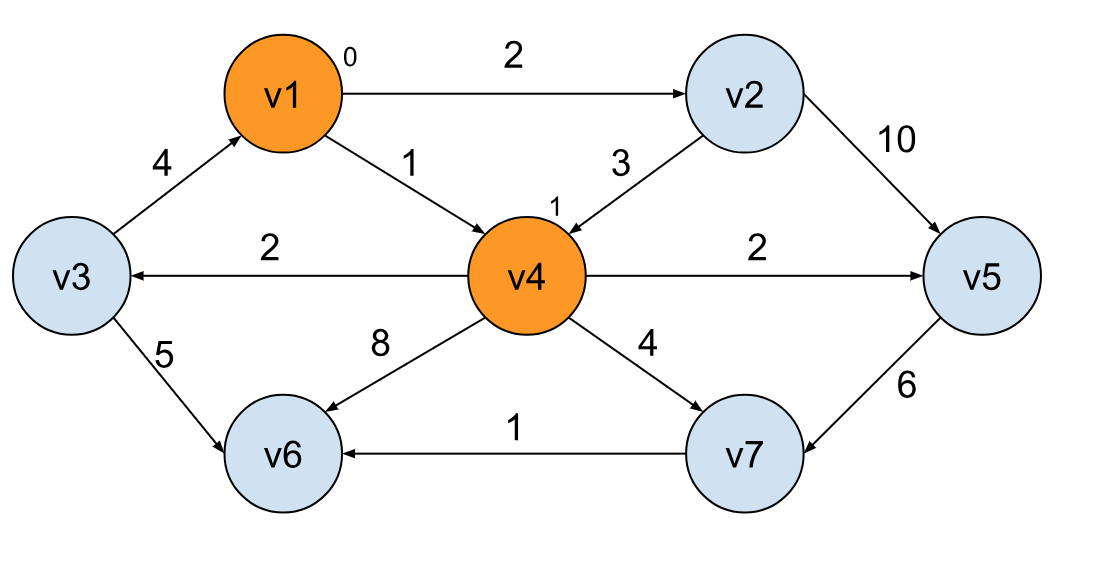
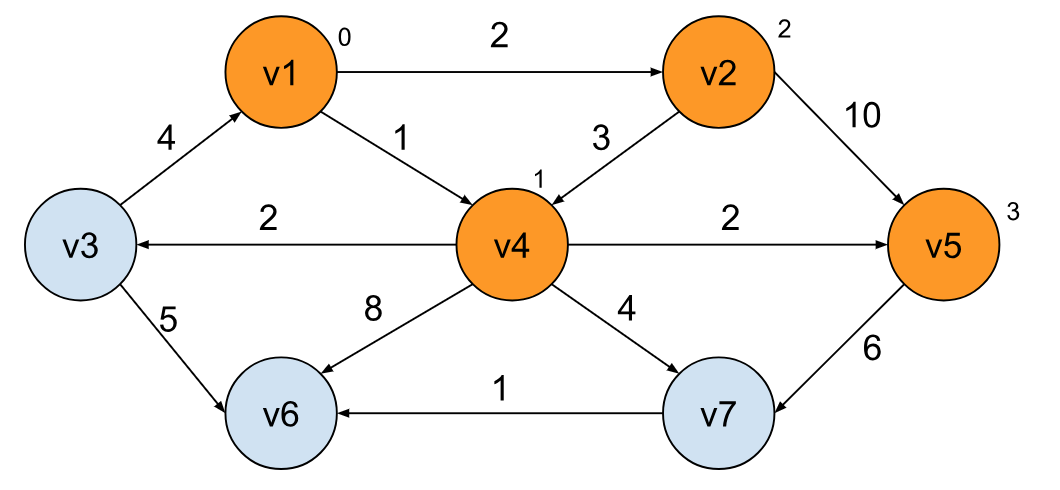
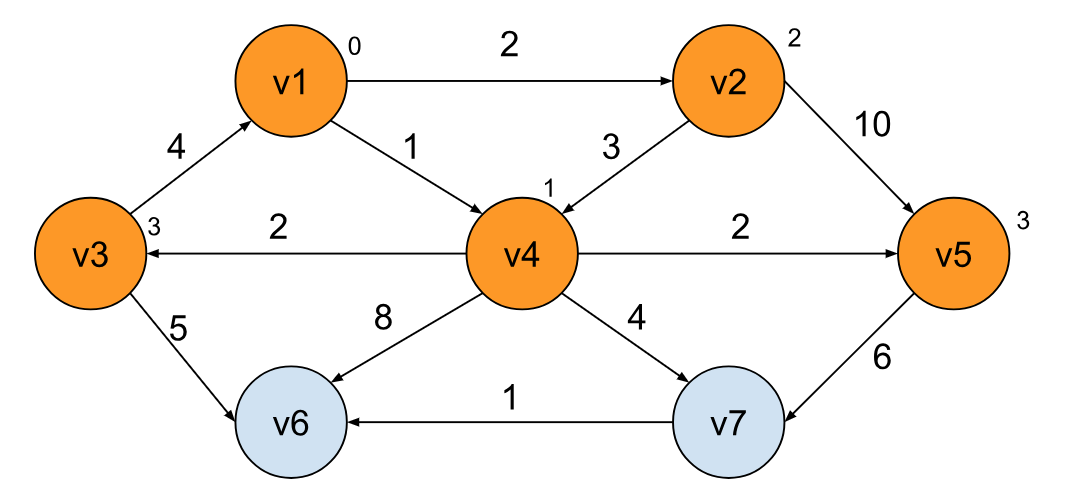
这时我们可以选择去到 v2,通过 v4 我们又可以去到 v5,v6,v7,v3,还是老样子,选择当前路径最短的点,去到 v2 只需要花费 0 + 2 的开销,为当前的最小:

每到一个节点我们就将此节点标记起来,表明下次不会再访问,于此同时,通过这个节点我们可以解锁去到其他节点的路径,比如这里就解锁了 2 -> 5 的路径,但是我们需要选择最小开销,对比下来,还是 4 -> 5 的路径总开销比较小,为 1 + 2 = 3:
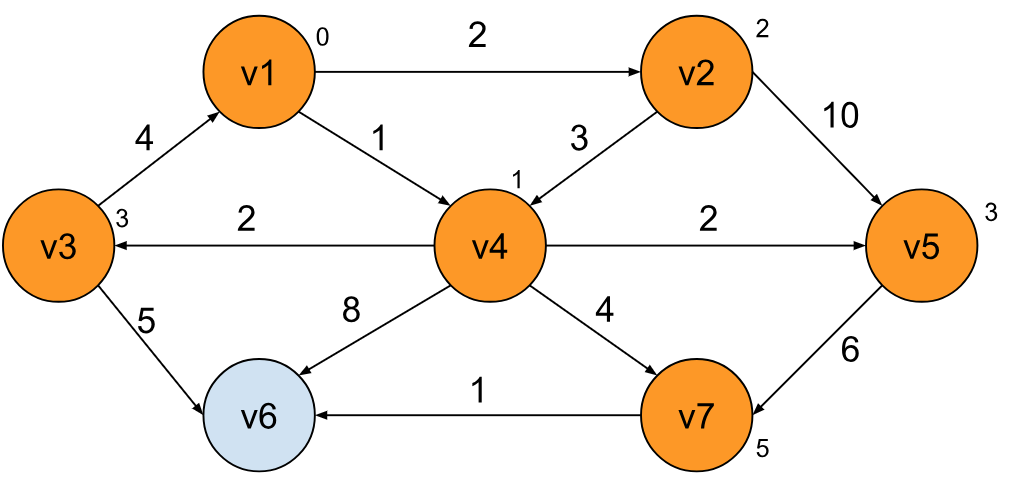
同样的策略,我们可以将 v3 标记并得出 v1 到 v3 的最短路径:
类似的方法,我们也可以得出 v1 到 v6,以及 v7 的最短路径:
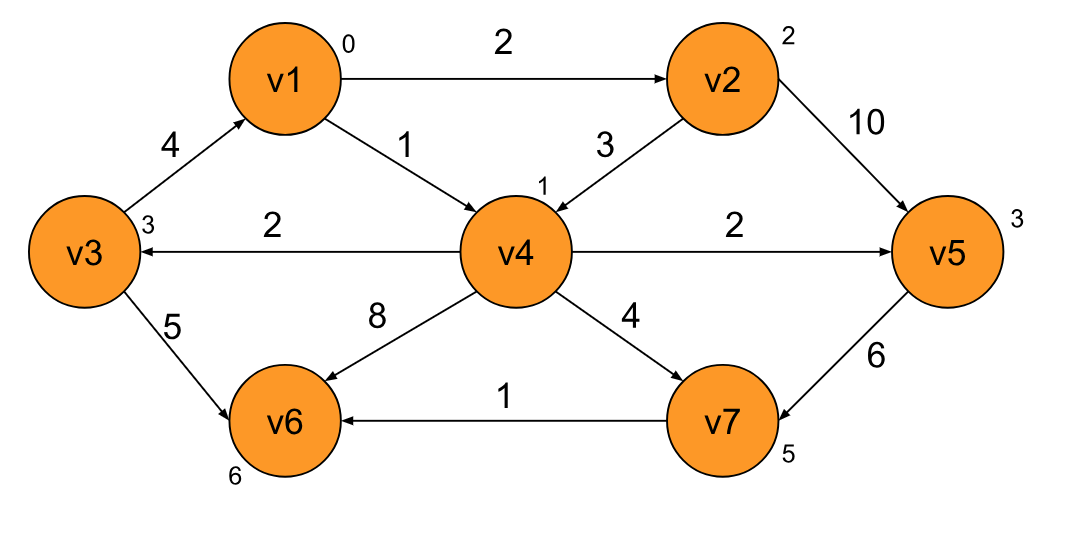
整个算法跑完,我们就可以得出 v1 到任意节点的最短路径的值具体是多少,当然,如果有需要,你也可以将具体的路径给保存下来,方法和计算路径和类似。
最开始接触这个算法的时候,最为困惑的点在于如何证明这个算法的正确性?为什么这里的局部最优可以推广到全局最优?
假设我们的起始点为 $ V_s $,一开始的时候我们发现存在 $ V_s $ 到 $ V_t $ 的直接路径,怎么确定这个路径就一定是最短的?我们是否可以从 $ V_s $ 先到其他节点,然后再从其他节点再到 $ V_t $?如果当前所有 $ V_s $ 到其相邻节点的直接路径中,$ V_s $ 到 $ V_t $ 是最短的,那就排除了这种情况,因为从 $ V_s $ 到其他节点的开销已经超过了从 $ V_s $ 直接到 $ V_t $ 的开销,并且重点是图中没有负权重,那么即使有其他的路径,那这个路径也不会产生更低的开销。把这里的 $ V_s $ 换成是任意中间节点,也是一样的,只不过我们考虑的不再是单个边,而是路径和。因此,每次仅考虑当前最短的路径和就能保证最终的答案是最短的。
回到之前的问题,为什么图中有负权重存在的话,这个算法将不奏效。道理很简单,我们不能排除未知的路径,该路径会经过权重为负的边到达我们已标记的节点,让我们的结果变得不正确,比如下面这个例子:
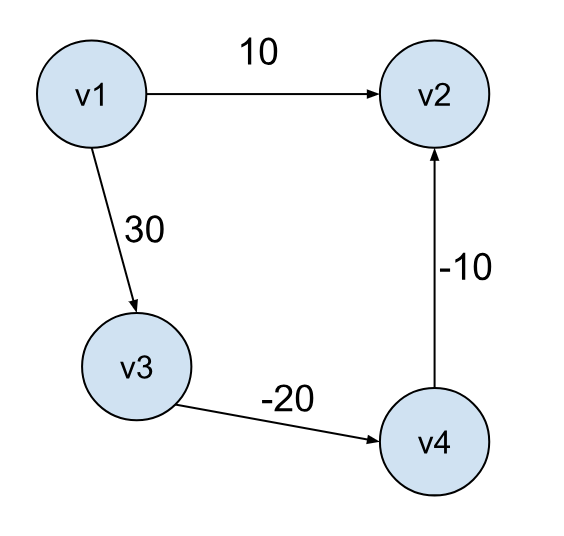
如果起始节点是 v1,那么按照此算法,到 v2 的最短路径会被认为是 10,然而 v1 -> v3 -> v4 -> v2 的路径开销为 0。
由此可见,图中不含有负权重的边是 Dijkstra 算法成立的必要条件。
具体实现:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
class Vertex {
public Map<Vertex, Integer> adj; // adjacency vertex to edge's weight
public boolean visited;
public int dist;
}
class VertexCompare implements Comparator<Vertex> {
public int compare(Vertex s1, Vertex s2) {
return s1.dist - s2.dist;
}
}
void dijkstra(Vertex s, Vertex[] graph) {
for (Vertex v : graph) {
v.dist = Integer.MAX_VALUE;
v.visited = false;
}
PriorityQueue<Vertex> pq = new PriorityQueue<>(
new VertexCompare<Vertex>()
);
s.dist = 0;
pq.add(s);
while (!pq.isEmpty()) {
Vertex cur = pq.poll();
if (cur.visited) {
continue;
}
cur.visited = true;
for (Vertex n : cur.adj.keySet()) {
if (!n.visited) {
int cost = cur.adj.get(n);
if (cur.dist + cost < n.dist) {
n.dist = cur.dist + cost;
pq.add(n);
}
}
}
}
}
在上面的实现中,我们利用了优先队列(堆),把每次找最小值的时间缩小至 O(logV),其中 V 表示的是节点的个数。除了节点,我们还需要挨个遍历每个节点的边,假设边的个数是 E,由此可得算法的时间复杂度为 O(ElogV + VlogV) = O(ElogV)。
因为我们是通过边来确定是否将某节点加入到队列,也就是说队列中可能同时存在两个节点,因此空间复杂度是 O(E)。